
Description générale
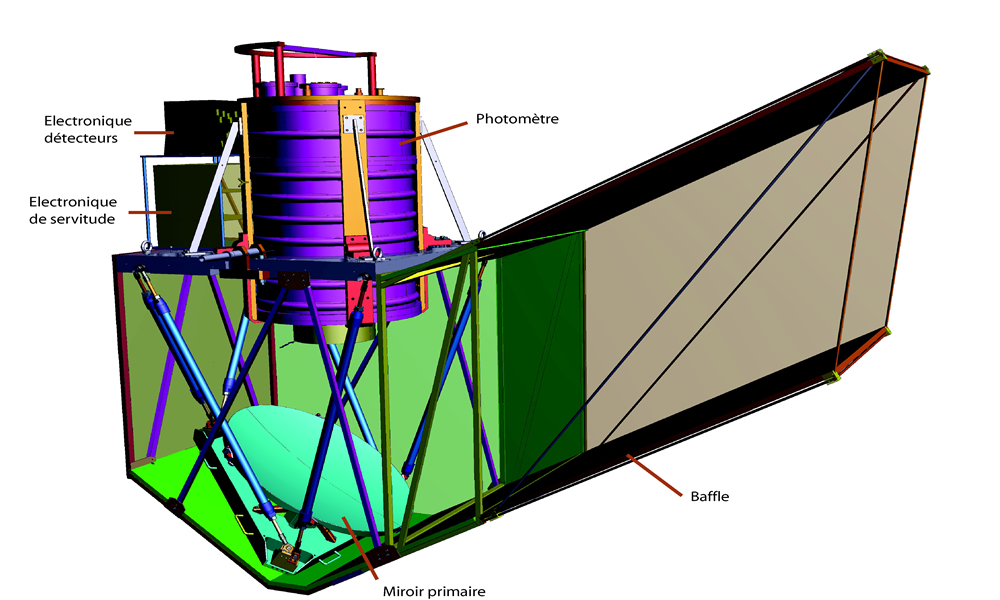
L'instrument scientifique comprend :
- L'armature mécanique avec son bafflage et le mécanisme de réglage du miroir primaire
- Le miroir primaire de 830 mm de diamètre utile
- Le photomètre
- L'électronique de lecture des détecteurs
- L'électronique de lecture des servitudes (UGTI), le calculateur instrument et les convertisseurs DC-DC (28V en +/- 15V et +5V)
Quelques vues de l'instrument :
- Instrument scientifique dans la nacelle
- Instrument sur Charali (CHariot pour les ALIgnements)
- Instrument seul





.jpg)
.jpg)
Exigences et performances fonctionnelles
Il s’agit des 4 fonctions principales de l’instrument scientifique :
- mesure de la polarisation linéaire,
- mesure radiométrique,
- imagerie de cartes du ciel,
- traitement du signal.
Mesure de la polarisation linéaire
La première fonction de l’instrument scientifique PILOT est la mesure du degré de polarisation linéaire. Pour effectuer cette mesure, il est nécessaire de connaître les trois paramètres de Stokes I, Q et U.
- Le degré de polarisation linéaire attendu est P <5%.
- L’erreur de mesure du degré de polarisation attendue est <0, 01.
- L’erreur de mesure sur la direction de polarisation attendue est <0, 5°.
Mesure radiométrique
La deuxième fonction de l’instrument concerne la mesure radiométrique, c’est à dire la mesure de flux de photons dans des bandes submillimétriques. Les détecteurs doivent être suffisamment nombreux et suffisamment sensibles pour obtenir un bon rapport signal sur bruit. Pour répondre à cette fonction, l’instrument sera équipé de matrices de détecteurs (2048 bolomètres répartis sur deux blocs) refroidies à 300mK pour limiter leur bruit propre.
Longueurs d’onde et largeurs de bande :
L’instrument devra réaliser la mesure sur deux bandes spectrales, centrées sur 240 μm et 550 μm (seule la bande 240 sera fonctionnelle pour le vol 1), grâce à un filtrage adapté et à une optimisation des matrices à ces longueurs d’onde. La largeur des deux bandes devra résulter d’un compromis entre le rapport signal sur bruit par pixel, les contraintes astrophysiques (domaine de longueur d’onde d’émission des poussières) et l’intensité du background qui limite la sensibilité.
Signal de fond et sensibilité :
Un modèle photométrique a été développé. Pour chaque bande spectrale, ce modèle calcule la puissance du signal de fond instrumental reçue par un pixel de la matrice de bolomètres. Ce modèle montre que l’essentiel de la contribution au bruit de photon provient de l’émission thermique du miroir primaire (refroidi passivement) et du premier filtre après la fenêtre d’entrée du photomètre.
Imagerie de cartes du ciel
La troisième est une fonction d’imageur qui permet au système de réaliser des cartes du ciel. L’instrument devra permettre un balayage en élévation et azimut. Le système optique devra avoir un champ de vue et une résolution angulaire suffisante pour répondre aux objectifs scientifiques et permettre une reconstruction du ciel. Pour ce faire, les matrices de détecteurs seront utilisées. Ces cartes devront être réalisées en limitant au maximum les effets systématiques comme les lumières parasites, l’émission thermique propre de l’instrument ou de l’environnement, les déformations dues aux effets thermiques ou à la gravité.
Résolution :
La qualité image est spécifiée actuellement en terme de résolution angulaire. Celle ci résulte de la limitation par la diffraction de la plus grande longueur d’onde liée à la taille du miroir primaire, des aberrations, de l’effet fenêtre du détecteur et sa taille, du balayage, de l’échantillonnage sur le ciel et de la fréquence de lecture des matrices et du temps de réponse des détecteurs. De plus, il faut que cette résolution soit inférieure ou égale à la résolution des données du satellite IRAS par rapport auxquelles les données PILOT seront comparées : environ 3,50'.
Champ de vue :
Cette résolution contraint les performances concernant le champ de vue. De même, le balayage doit permettre aux matrices de "repasser" sur les mêmes points du ciel, il faut donc un recouvrement suffisant pour compenser le balancement de la nacelle. Enfin, l’utilisation des mêmes matrices que celles développées pour l’instrument PACS du satellite HERCHEL impose aussi la dimension géométrique du plan focal et le champ de vue angulaire. Champ de vue instantané: environ 1°.
Balayages :
La réalisation des séquences d’observation est une action coordonnée de la nacelle et de la charge pointée. Elles devront être pilotées par l’instrument. La nacelle est suspendue à un mécanisme lui permettant de réaliser des rotations azimutales. A l’intérieur de la nacelle, la charge pointée est montée sur un axe horizontal lui permettant de pivoter en élévation à l’aide d’un vérin électrique. L’exploration en élévation de la charge pointée sera comprise entre 20° et 60° par rapport à l’horizontale. Les cartes du ciel seront d’environ 10° × 30° pour l’exploration du plan galactique et d’environ 3° × 3° avec un temps d’intégration plus long pour les zones les plus diffuses du ciel où une meilleure sensibilité est requise.
Traitement du signal et contrôle de l’instrument
Enfin, la quatrième fonction de l’instrument scientifique concerne le contrôle de l’instrument et le traitement des données a bord. Il devra permettre :
- le contrôle de l’instrument,
- la lecture des données scientifiques et des données de servitude de l’instrument,
- le stockage,
- la compression éventuelle,
- la communication avec le calculateur de la nacelle et les autres dispositifs utiles à l’instrument
(vérin, GPS nacelle, servitudes nacelles, etc.),
- la mise en forme des données pour être envoyées au sol (distributions des données aux clients, si le débit le permet le traitement pourra être fait au sol et non à bord).
Vue 3D
Autres vues
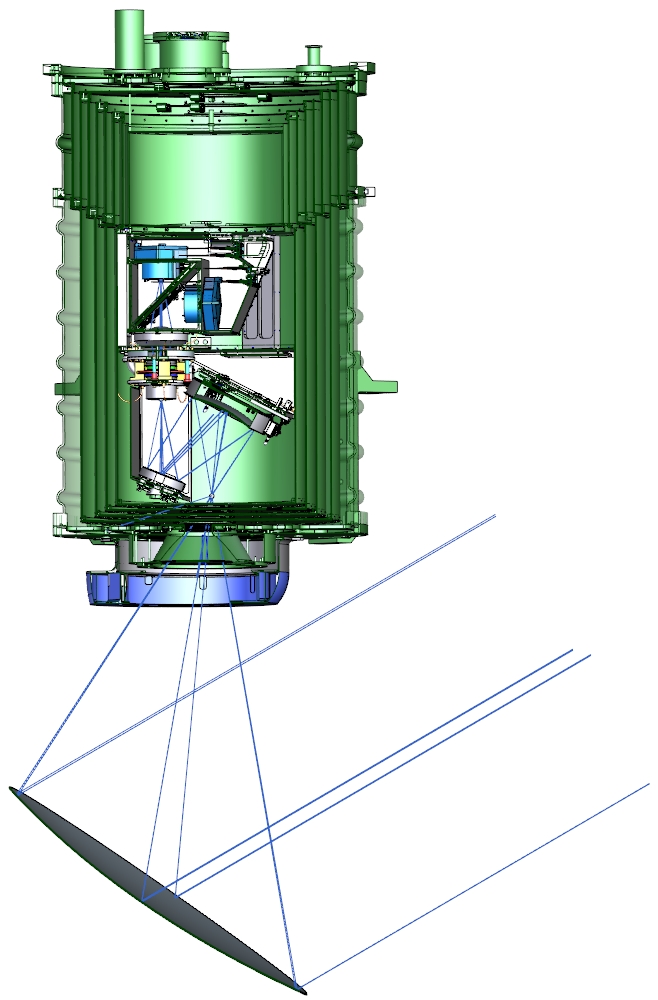
Vue générale de l'ensemble de détection :
{kind=link}